can.h File Reference
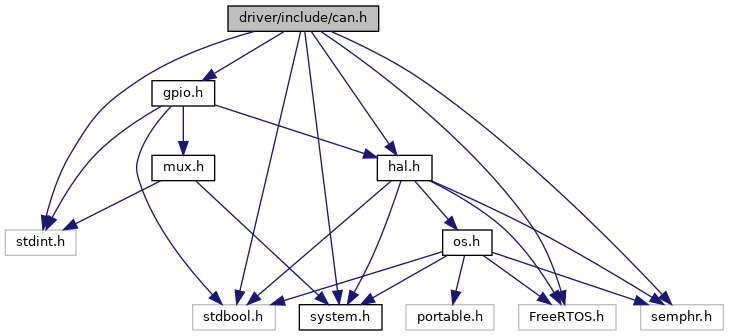
#include <stdint.h>#include <stdbool.h>#include <system.h>#include <FreeRTOS.h>#include <semphr.h>#include <hal.h>#include <gpio.h>
Include dependency graph for can.h:
Go to the source code of this file.
Data Structures | |
| struct | can_filter |
| struct | can_msg |
| struct | can_generic |
Typedefs | |
| typedef uint32_t | can_error_t |
| typedef uint64_t | can_errorData_t |
Functions | |
| struct can * | can_init (uint32_t index, uint32_t bitrate, struct gpio_pin *pin, bool pinHigh, bool(*callback)(struct can *can, can_error_t error, can_errorData_t data, void *userData), void *data) |
| int32_t | can_deinit (struct can *can) |
| int32_t | can_setCallback (struct can *can, int32_t filterID, bool(*callback)(struct can *can, struct can_msg *msg, void *data), void *data) |
| int32_t | can_registerFilter (struct can *can, struct can_filter *filter) |
| int32_t | can_deregisterFilter (struct can *can, int32_t filterID) |
| int32_t | can_send (struct can *can, struct can_msg *msg, TickType_t waittime) |
| int32_t | can_recv (struct can *can, int32_t filterID, struct can_msg *msg, TickType_t waittime) |
| int32_t | can_sendISR (struct can *can, struct can_msg *msg) |
| int32_t | can_recvISR (struct can *can, int32_t filterID, struct can_msg *msg) |
| int32_t | can_up (struct can *can) |
| int32_t | can_down (struct can *can) |